
About Me
I'm a machine learning engineer with deep expertise in perception systems, 3D geometry, and embodied AI. My work focuses on building intelligent systems that can perceive, reason, and act in both physical and XR environments.
During my PhD at INSA Lyon and Naver Labs Europe, under the supervision of Boris Chidlovskii, Christian Wolf and Atilla Baskurt . I specialized in visual navigation for mobile robots; developing deep learning models grounded in 3D geometry for spatial reasoning and real-world deployment. My research addressed the sim-to-real gap by combining geometric priors with robust, physically-tested solutions on actual robotic platforms.
Today, I apply this experience to the AR/VR domain, working on the perception layer for immersive and interactive systems. I design machine learning models that process and understand XR input data to support embodied interaction in virtual spaces.
I'm also deeply interested in Vision-Language-Action (VLA) models, reinforcement learning for embodied agents, and scalable perception systems that generalize across tasks, environments, and input modalities. My goal is to build AI systems that enable seamless interaction across both real and synthetic worlds.
I hold a Master's degree in Machine Learning and Data Science from Université Grenoble Alpes and ENSIMAG, and earned my Bachelor's degree in Computer Engineering from Cairo University, where I graduated summa cum laude.
Interests: AR/VR, Spatial Intelligence, 3D Perception, Embodied AI, Visual Navigation, Sim-to-Real Transfer, Reinforcement Learning, Vision-Language-Action (VLA)
Companies I've worked with

Qualcomm

NAVER LABS Europe
Microsoft

Valeo

Mentor Graphics
Research
Learning with a Mole: Transferable latent spatial representations for navigation without reconstruction
Guillaume Bono, Leonid Antsfeld, Assem Sadek, Gianluca Monaci, Christian Wolf
International Conference on Learning Representations (ICLR 2024)
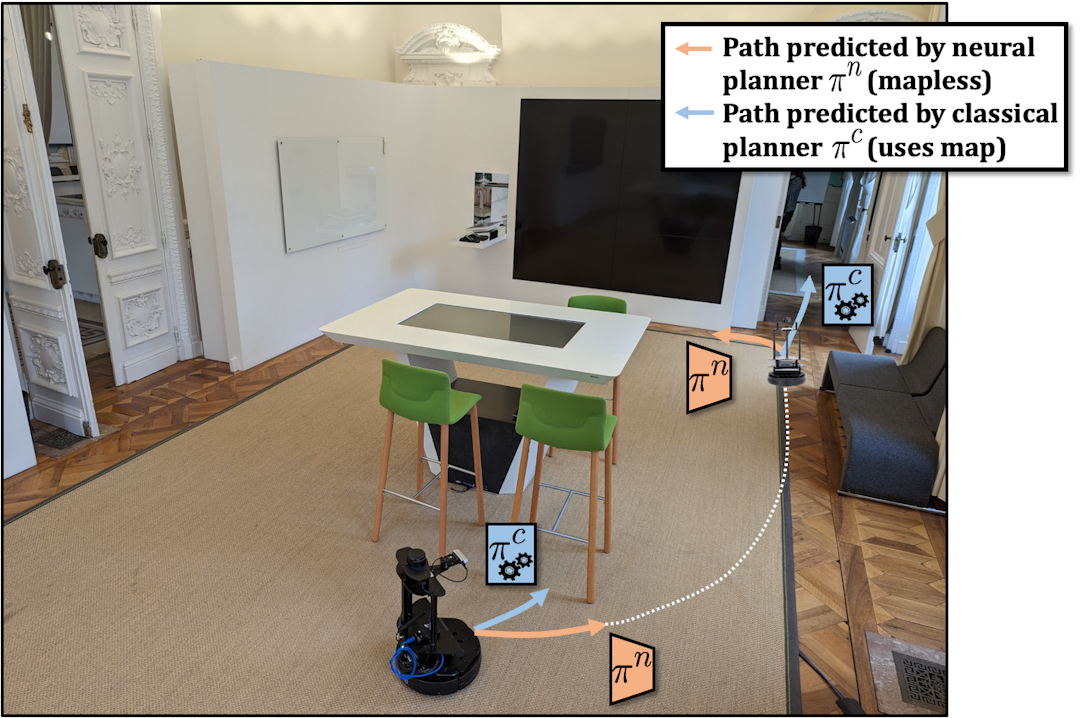
Learning whom to trust in navigation: dynamically switching between classical and neural planning
Sombit Dey, Assem Sadek, Gianluca Monaci, Boris Chidlovskii, Christian Wolf
International Conference on Intelligent Robots and Systems (IROS 2023)

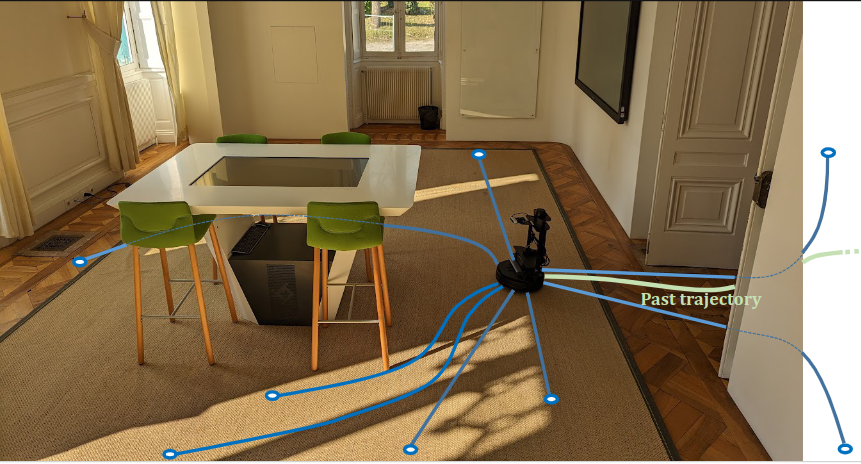
Multi-Object Navigation in real environments using hybrid policies
Assem Sadek, Guillaume Bono, Boris Chidlovskii, Atilla Baskurt, Christian Wolf
International Conference on Robotics and Automation (ICRA-2023)
An in-depth experimental study of sensor usage and visual reasoning of robots navigating in real environments
Assem Sadek, Guillaume Bono, Boris Chidlovskii, Christian Wolf
International Conference on Robotics and Automation (ICRA-2022)
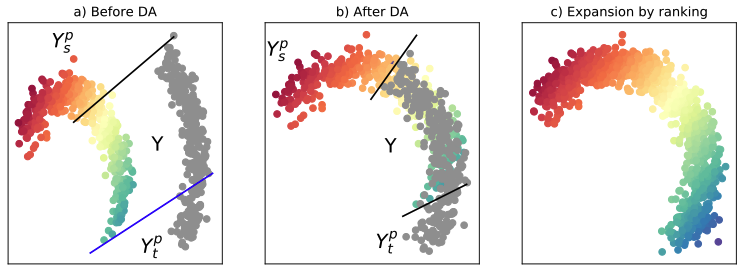
Universal Domain Adaptation in Ordinal Regression
Boris Chidlovskii, Assem Sadek, Christian Wolf
Arxiv
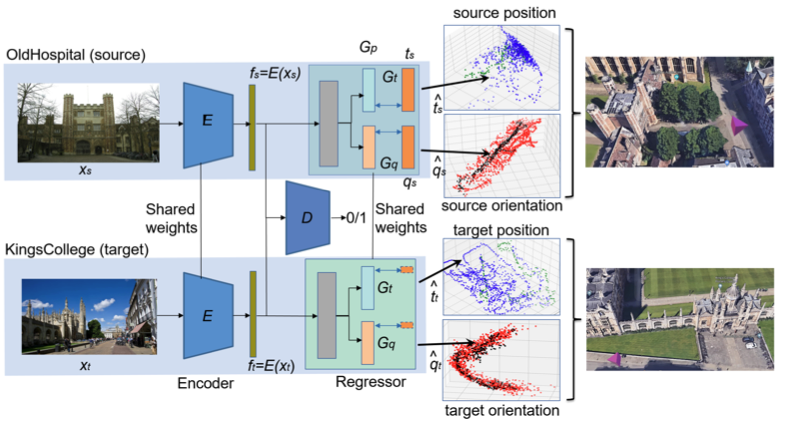
Adversarial Transfer of Pose Estimation Regression
Boris Chidlovskii, Assem Sadek
European Conference on Computer Vision (ECCV-2020), TASK-CV Workshop
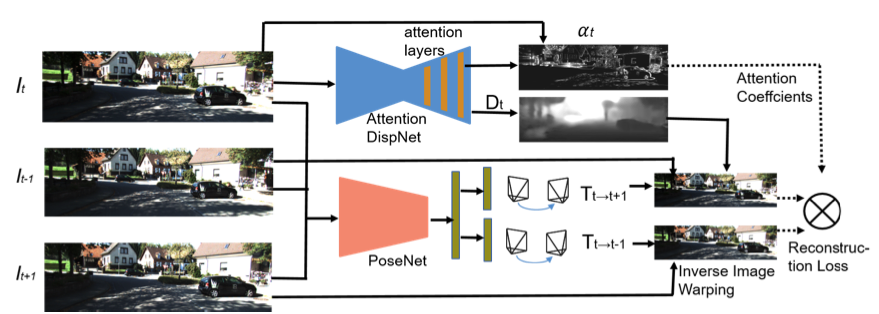
Self-Supervised Attention Learning for Depth and Ego-motion Estimation
Assem Sadek, Boris Chidlovskii
International Conference on Intelligent Robots and Systems (IROS-2020)